Evrim'i Destekleyen/Kullanan Bilimler - 7: Evrimsel Robotik
:sharpen(0.5,0.5,true)/old%2Fcontent_media%2F4bee5895754b86f04211f84dc3224abe.jpeg)
:sharpen(0.5,0.5,true)/profile%2F2aacbbe4-281f-4f73-9317-6cfea6fc8bc0.jpeg)
Bu Makalede Neler Öğreneceksiniz?
- Evrimsel biyoloji, canlıların nesiller boyu genetik farklılaşma yoluyla değişmesini inceler ve bu doğa yasası mühendislikte biyomühendislik ve evrimsel robotik alanlarının temelini oluşturur.
- Mekatronik mühendisliği, mekanik, elektronik ve yazılım bilimlerini birleştirerek ortama adapte olabilen, öğrenebilen ve evrimsel biyolojiden esinlenen gelişmiş robotlar üretmeyi amaçlar.
- Evrimsel robotik deneylerinde, robot popülasyonları rastgele yazılım varyasyonları ve seçilim baskısı altında nesiller boyunca evrimleşerek karmaşık görevleri, örneğin engellerden kaçmayı, biyolojik evrim gibi başarıyla öğrenebilmektedir.
Önemli Bilgi: Aşağıda okuyacağınız yazı, ilk olarak 20 Haziran 2013 Perşembe günü, Sayın Alper Dizdar'ın editörlüğünde, soL gazetesinin 13. ve 14. sayfalarında, BilimsoL kısmında yayımlanmıştır. Görseller, doğrudan gazeteden alınarak eklenmiştir. Lütfen başka bir yerde yayınlamadan önce, Evrim Ağacı'ndan izin alınız. Sitemiz aracılığıyla (makalenin sonundaki paylaşım tuşlarıyla) dilediğiniz gibi sosyal medya içerisinde paylaşabilir ve yayabilirsiniz. İyi okumalar.
Teknolojimize Yön Veren Evrim!
Günümüzde teknolojinin geldiği nokta, bir zamanlar hayal dahi edilemiyordu. Öyle ki, geçmişin bilim-kurgu romanlarının sayısız fantastik ve olağanüstü ögesi, günümüzde artık sıradan olgular haline geldi. Muhtemelen günümüzün bilim-kurgu unsurları da, geleceğin gerçekleri olacak. Şu anda, özellikle uygulamalı bilimler (mühendislik bilimleri) ile temel bilimler (fizik, kimya, biyoloji ve ilişkili bilim dalları) arasındaki birleşme/bütünleşme giderek hızlanıyor. Bugünün hayallerini geleceğin gerçekleri yapacak çalışmalar, genellikle bu disiplinler arası bölgelerde yürütülüyor. Bunlardan son dönemlerde bilim camiası içerisinde en ilgi çekenlerden birisi, bir tarafta temel bilimlerin birleştirici harcı konumunda olan evrimsel biyoloji ile diğer tarafta sayısız mühendislik biliminin birlikteliğinden doğan mekatronik mühendisliğinin bir araya gelmesinden doğan biyomühendislik (biyolojiden esinlenen mühendislik) alanıdır. Bu dosyada sizlere, esasında oldukça geniş bir çalışma alanına sahip olan biyomühendislik bilimleri altında yürütülen evrimsel robotik hakkında bazı temel bilgiler vereceğiz. Bu sayede evrimsel biyolojinin günümüz mühendisliğine nasıl yön verdiğini gösterebilmeyi hedefleyeceğiz.

Değişimin Biyolojisi: Evrim
Evrimsel biyoloji (ya da evrim biyolojisi), en basit tanımıyla, var olmuş ve var olan tüm canlıların birbirleriyle olan akrabalık ilişkilerini inceleyen ve bu canlılar ile canlı gruplarının evrimsel geçmişlerini anlamayı ve analiz etmeyi hedefleyen bilim dalıdır. Evrimsel biyoloji, insanlığın bin yıllardır farkında olduğu değişim fikrine dayanır. Canlılarda meydana gelen ve canlı nesillerinin atalarından toplum (popülasyon) bazında genetik (dolayısıyla fiziksel) olarak farklılaşması olarak tanımlanabilecek olan evrim gerçeği (yasası/ilkesi) üzerine kurulu, bu yasanın neden ve nasıl çalıştığını anlamaya çalışan bir bilim dalıdır. En merkezinde, bu doğa yasasını inceleyen Evrim Teorisi yer almaktadır. Ancak bu dosya yazımızdan da anlayabileceğiniz gibi, biyolojiden köken alan bu bilim dalı, günümüzde hayal edebileceğimiz sınırların ötesine çıkarak neredeyse istisnasız olarak her bilim dalının içerisinde kendisine yer bulabilmiştir.
Evrimsel Biyoloji alanında, kendisinden öncekilerin bilgilerini, kendisinin keşfettiği sayısız bulgu ile birleştirerek sistematik hale getiren ve evrimin “babası” olarak bilinen Charles Robert Darwin’in (12 Şubat 1809- 19 Nisan 1882) zamanından bu yana çok sayıda değişim ve gelişim meydana geldi. Darwin’den sonra bu bilime duyulan ilgi arttı ve konuda uzmanlaşan yüz binlerce bilim insanı, evrim kuramını geliştirerek farklı doğa yasalarını izah etmeyi başardılar.
Evrimin temelinde yatan canlılığın kademeli olarak, nesiller boyu değiştiği fikri, mühendislik için önceden üzerinde düşünülmemiş ufuklar da yarattı. Çünkü mühendislik bilimlerinin gittiği nokta da, artık insan müdahalesinden tamamen bağımsız, özgür kararlarını alabilen, duruma göre kendisini şekillendirebilen, planlar kurabilen, geçmişi, bugünü ve geleceği ayırt edebilen, farklı ortam koşullarına farklı tepkiler üretebilen ve daha nice canlı-benzeri uyum sağlayabilir özelliklere sahip ürünler üretme yönündedir. Hemen hemen her mühendislik dalında üzerinde en üst düzey çalışmaların yürütüldüğü konular, bu şekilde otomasyon (makineleri/sistemleri otomatik hale getirme) ve yapay zeka teknolojileri üzerinedir. Ancak söz konusu canlıların ana özelliklerinden biri olan dışarıdan önceden tanımlı komutları almadan, değişen ortamlara adapte olabilen makineler ve sistemler yaratmak ise, bunu milyarlarca yıldır yapabilen doğadaki organizmalardan fikirler almadan yapabilmek çok zor ve zahmetli bir iştir. İşte bu sebeple tüm bu üst düzey teknolojiler (sadece robotlar değil), mühendislik malzemelerinden günlük ev aletlerine kadar çok geniş bir yelpazede canlılık biliminden (biyolojiden) esinleniyor. Bu yazımızda da bu esinlenme örneklerine değinmeye çalışacağız.
“Özgür” Robotların Bilimi: Mekatronik
Mekatronik, “mekanik” ve “elektronik” kelimelerinin birleştirilmesinden türetilmiş bir kelimedir. Her ne kadar ismen Makina Mühendisliği ile Elektrik-Elektronik Mühendisliği’nin birleşimi olarak anılsa da, içeriğinde Bilgisayar Mühendisliği, Metalurji ve Malzeme Mühendisliği, Yazılım Mühendisliği, Sistem Mühendisliği gibi pek çok farklı bilim dalı bulunmaktadır. En temel tanımıyla, bu bilim dallarının ortaklaşa ürettikleri ürünlerin tamamının mühendisliği olarak düşünülebilir. Ana uygulama alanı, insanın doğrudan müdahalesi olmaksızın çalışabilen ve mümkünse farklı çalışma ortamlarına/koşullarına adapte olabilen ürünler tasarlamaktır. En yaygın olarak bilinen alanı robotik olsa da, esasında bundan çok daha fazlası mekatronik ürünler arasında yer almaktadır: bilgisayarlarımızın içerisindeki birçok farklı parça (CD okuyucular gibi), mutfakta/bahçede kullanılan ev aletlerinin pek çoğu, yazıcı, tarayıcı, para sayma makinesi gibi ürünler, mekatronik ürünler kapsamında ele alınmaktadır.
Mekatronik denince akla gelen ilk alan robotiktir. İsminden de anlaşılabileceği gibi robotik bilimi, robot üretimi ve geliştirilmesi üzerinde araştırmalar yapan bilim dalıdır. Robotlar günümüzde giderek artan bir kapsama ulaşıyor ve gün geçtikçe, insanın ulaşamayacağı birçok coğrafi bölgeye ulaşmayı, insanın dayanamayacağı birçok olumsuz koşulda çalışmayı ve insanın gerçekleştiremeyeceği birçok işlemi/işlevi gerçekleştirmeyi mümkün kılıyor. Hatta günümüzde insanın meziyetlerini aşarak, tüm canlılığı kapsayacak bir içeriğe eriştiği de söylenebilir. Bu sebeple robotlar üzerinde yapılan çalışmalar, diğer biyolojik unsurlar üzerinde yapılan tüm çalışmalar ile paralellik gösteriyor. Robotik bilimi sayesinde bir organizmanın davranışlarını, fizyolojisini, anatomisini, biyomekaniğini ve geriye kalan neredeyse tüm özelliklerini araştırmamız veya biyolojiden öğrendiklerimizi robotlarımızda kullanmamız mümkün oluyor (yani öğrenme ve uygulama iki taraflı işliyor). Yapılan çalışmalar, daha zorlu ve değişken koşullarda, daha verimli çalışabilmeleri için robotların geliştirilmesini hedefliyor.
Böylesine kapsamlı ve canlılık ile bütünleşik bir mühendislik dalının temel bilimlerle çok noktada kesişmesi ve hatta iç içe geçmesi oldukça anlaşılırdır. 20. yüzyılın ortalarından itibaren bu kesişim ve bütünleşme, biyolojiden esinlenen mühendislik kapsamında yepyeni bilimleri doğurdu. Evrimsel biyolojinin temel bilimlerde yaptığı devrim, sınırlarını aşarak mühendisliğin içerisine de girdi ve özellikle mekatronik ile birlikte kendine geniş bir çalışma alanı buldu. İşte bu noktada, evrimsel robotik alanının incelenmesi sayesinde bu iki bilim dalı arasındaki köprülerin nasıl kurulduğunu ve bu disiplinler arası çalışmanın teknolojimize nasıl yön verdiğini göreceğiz.
Evrimleşen Makineler: Evrimsel Robotik
Evrimsel Robotik, evrimsel biyolojinin ortaya koyduğu doğa yasalarının robotların geliştirilmesinde kullanabileceğimiz fikrinden doğan bir bilim dalıdır. Temelleri 1990’lı yılların başında Roma’da atılmış olsa da, kökenlerini 1980’lere kadar takip etmek mümkündür. Ancak bilim çevresinde tanınırlığının artması, 1992 - 93 yıllarında İsviçre’nin Lozan kentinde bulunan Lozan Teknoloji Enstitüsü’nde (EPFL) görev yapan Dario Floreano, Laurent Keller ve Francesco Mondada’nın çalışmalarıyla mümkün oldu. Özellikle sürü davranışları üzerinde çalışan ve doğada görülen bu davranışları robot kümelerinde (swarm robotics) modelleyen araştırmacılar, bir “robot sürüsü” içerisindeki tekil robotların davranışlarının, sürünün bütünsel (kollektif) davranışını doğrudan etkilediğini ispatladılar. Üstelik bu çok basit ve bireysel davranışların sürü içerisinde etkisinin katlandığını ve karmaşık davranışların bu basit basamaklarla evrimleşebileceğini gösterdiler. Teknolojik unsurlarda bile evrimin açıklama gücünden faydalanabilecek olduğumuzun keşfedilmesi, bilim dünyasında evrimsel biyolojinin önemini bir kat daha arttırdı. Bu noktadan sonra mühendislik dalında çalışmalar yürüten birçok robotik bilimci, biyoloji ve evrim ile ilgilenmeye başlayarak bu alandaki doğa yasalarını teknolojiye dâhil etmeye başladılar. Böylece yürütülen çalışmalar da katlanarak arttı ve hem mühendislik alanında da evrimin öneminin anlaşılması sağlandı, hem de evrimsel ilkeler mühendislikte kullanılmaya başlayarak henüz emekleme evresinde olan yepyeni bir bilim dalı olan evrimsel robotik doğdu.

Bu alanda yapılan çalışmalar, temel olarak robotların yazılımlarının canlı yapıların biyolojik özelliklerini ve evrimsel değişimlerini taklit etmesi sonucu doğan etkileşimler sayesinde robotun biyolojik-benzeri özellikler kazanmasını hedefliyor. Burada anlaşılması gereken bir nokta bulunuyor: İnsanlar, robotlardan bahsedildiğinde yapmaları gereken her şeyin yazılım olarak yüklendiği, dolayısıyla yapması gerekenin %100 önceden-tanımlı olduğu makinalar hayal etmektedirler. Geride bıraktığımız on yıllardaki robot kullanımı bu olsa da, modern mühendislik bilimlerindeki robotlar artık bundan çok daha üst bir düzeydedir. Öyle ki, davranış temelli robotik ve benzeri gelişmiş yaklaşımlar sayesinde üretilen robotlara, artık yapmaları gereken şeyler olduğu gibi kodlanmamakta, bunun yerine davranış ve öğrenme algoritmaları (kod dizileri) yüklenmektedir. Dolayısıyla geleneksel anlamıyla düşüneceğiniz bir robot, bir ürünü bir üretim bandından alıp bir diğerine koymak gibi basit ve kendini tekrar eden bir iş yapıyor olabilir. Ancak günümüz modern robotları kendisine söylenen sözleri anlayabilen, deneyimlerinden ders çıkarabilen, hafızasındaki bilgileri birbiriyle ilişkilendirerek kendisine öğretilmeyen sonuçları çıkarabilen, düşünebilen ve hatta kendi varlığının farkında bile olabilen bir noktadadır. Buradan da anlaşılabileceği gibi, artık robotlar, onları, zekâlarını ve yapabileceklerini küçümseyebileceğimiz düzeyi çoktan aşmıştır.
Evrimleşerek Uyum Başarısını Artıran Robotlar!
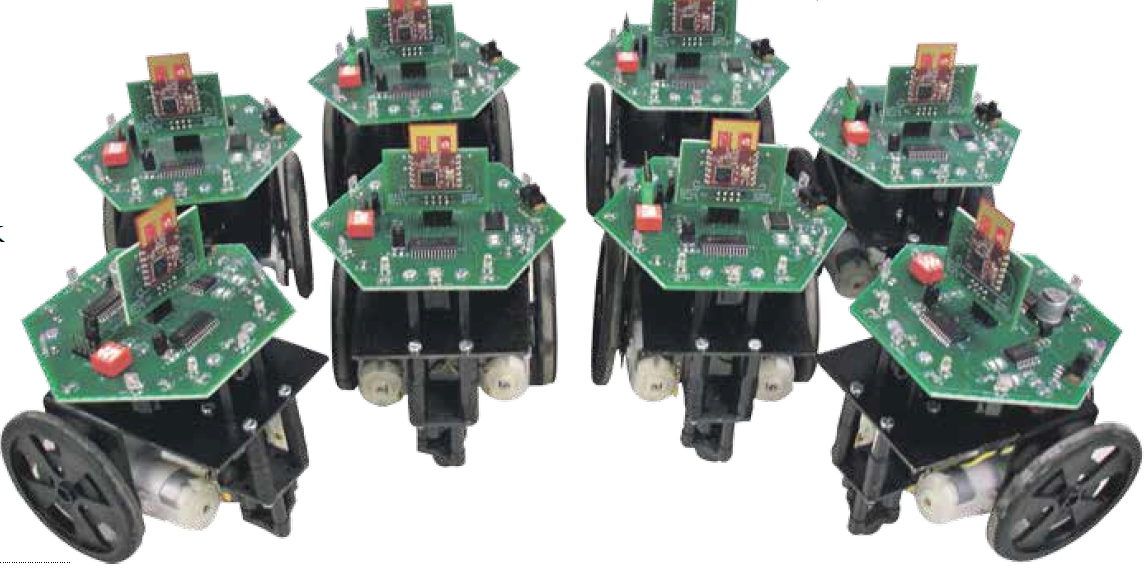
Şimdi tipik bir evrimsel biyoloji deneyi sayesinde gözlemleyebildiğimiz ilginç gerçekleri görelim. Ele alacağımız örnek deneyde yapılan şudur: deneyde iki tekerlekli ve üzerinde 8 adet mesafe sensörü olan 80 tane robot kullanıldı. Bu 8 “duyu sensöründen” gelen bilgi işlendikten sonra 2 fiziksel unsura (çıktıya) dönüştürüldü: hareketin yönü ve hızı. Fark edilebileceği gibi bu 80 robot, bir robot-birey popülasyonunu oluşturdu (tıpkı insanların bir araya gelerek bir toplumu oluşturması gibi).
Aslında maddi destek istememizin nedeni çok basit: Çünkü Evrim Ağacı, bizim tek mesleğimiz, tek gelir kaynağımız. Birçoklarının aksine bizler, sosyal medyada gördüğünüz makale ve videolarımızı hobi olarak, mesleğimizden arta kalan zamanlarda yapmıyoruz. Dolayısıyla bu işi sürdürebilmek için gelir elde etmemiz gerekiyor.
Bunda elbette ki hiçbir sakınca yok; kimin, ne şartlar altında yayın yapmayı seçtiği büyük oranda bir tercih meselesi. Ne var ki biz, eğer ana mesleklerimizi icra edecek olursak (yani kendi mesleğimiz doğrultusunda bir iş sahibi olursak) Evrim Ağacı'na zaman ayıramayacağımızı, ayakta tutamayacağımızı biliyoruz. Çünkü az sonra detaylarını vereceğimiz üzere, Evrim Ağacı sosyal medyada denk geldiğiniz makale ve videolardan çok daha büyük, kapsamlı ve aşırı zaman alan bir bilim platformu projesi. Bu nedenle bizler, meslek olarak Evrim Ağacı'nı seçtik.
Eğer hem Evrim Ağacı'ndan hayatımızı idame ettirecek, mesleklerimizi bırakmayı en azından kısmen meşrulaştıracak ve mantıklı kılacak kadar bir gelir kaynağı elde edemezsek, mecburen Evrim Ağacı'nı bırakıp, kendi mesleklerimize döneceğiz. Ama bunu istemiyoruz ve bu nedenle didiniyoruz.
:sharpen(0.5,0.5,true)/evrimagaci.org%2Fpublic%2Fimages%2Fmisc%2Ffeed-support-2.png)

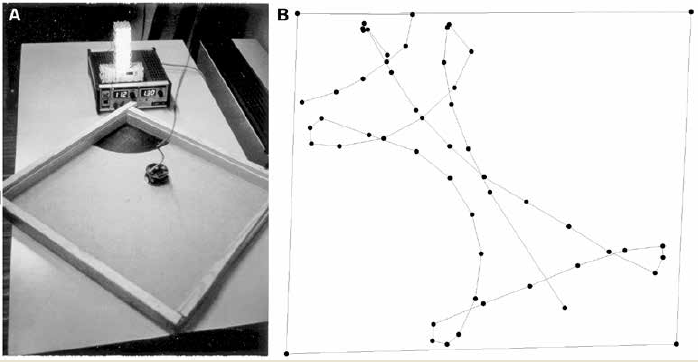
Bu robotların gerçek bir canlı popülasyonuna benzemesi için, evrimin ilkelerinin uygulanabilir hale getirilmesi gerekmekteydi. Bunun için bir seçilim baskısı yaratıldı: robotların önceden belirlenen bir parkur üzerinde hiçbir yere çarpmamaları gerekiyordu. Fakat eğer ki robotlarda birebir aynı kodlar bulunacak olsaydı, her robotun aynı davranışı sergilemesini beklerdik. Dolayısıyla her biri birbirinin aynı olan bir popülasyonun evrim geçirmesini bekleyemezdik.
İşte araştırmacılar bunu çözmek için şunu yaptılar: tıpkı aynı anne-babadan doğan kardeşlerin genetik sebeplerle birbirinden farklı özelliklere sahip olması gibi, bu robotlar da rastgele belirlenen “rastlantısallık faktörü” etkisi altında, bu 8 sensörden gelen veriler ile 2 çıktı arasındaki bağlantılar değiştirilmekteydi. Yani üzerlerinde aynı yazılım kodu bulunan robotlar, aynı durumlar karşısında aynı tepkileri vermiyorlardı, çünkü sensörlerden gelen bilgiler her bir robotta farklı biçimlerde çıktıya dönüştürülüyordu ve bu tıpkı genetik aktarımda olduğu gibi rastgele belirleniyordu. Böylece gerçek canlı popülasyonlarında gördüğümüz çeşitlilik (varyasyon) robotlarda yaratılabilmiş oldu. Bu çeşitlilik içerisinde her nesilde ortama en uygun olanların (parkurda duvara en az çarpanların) seçilmesi ve bunların “hayatta kalarak üreyebilmeleri” sonucu evrim mümkün olacaktır. Burada yeni bir sorun doğdu: robotlardan başarılı olanlar nasıl “çiftleştirilebilir”?
Araştırmacılar bu sorunun da üstesinden geldiler: robotlardan başarılı olanlar araştırmacılar tarafından belirlenmekte (duvara en az çarpma şeklinde) ve sonrasında bu başarılı olanların yazılım içerikleri birbiriyle “çaprazlanmaktaydı”. Tıpkı bir üreme sırasında başarılı ebeveynlerin genlerinin çaprazlanması gibi! Bu çaprazlanma tıpkı gerçekte olan eşeyli üreme sırasında olduğu gibi, iki yazılımın belli rastlantısallık unsurları etkisi altında karışımı şeklinde olmaktaydı (gerçekte de crossing-over gibi mekanizmalar sebebiyle genler rastgele yavruya aktarılmaktadır). Bu karışım, yeni nesil robotlara yüklenmekte, böylece bir nevi “robot yavrulaması” sağlanmaktaydı. Üstelik araştırmacılar tıpkı canlılarda olduğu gibi robot nesilleri arasındaki kod aktarımı sırasında mutasyon benzeri rastgele değişimlere de izin verdiler. Bunu, yazılım içerisindeki bir mutasyon faktörü sayesinde sağladılar. Böylece robotların üremesi ve bu üreme sırasında genetik yeniden birleşme (rekombinasyon) sağlanmış oldu.
Deney başlatıldıktan sonra, ilk nesildeki robotların neredeyse tamamı, parkurdaki duvarlara çarparak “başarısız” oldular. Ancak bu robotlar arasından bazıları, kodlarındaki rastlantısallık faktöründen ötürü sahip oldukları niteliklerin parkurdaki engellerden kurtulma amacına daha uyumlu olmasından ötürü, doğru yöne, diğerlerinden daha başarılı bir şekilde ilerleyebildiler. İşte bu robotlar, araştırmacılar tarafından “başarılı” olarak etiketlendi. Yeni denemeye başlamadan önce, bu başarılı robotların yazılımları, yukarıda izah edildiği biçimde birbiriyle çaprazlandı. Tahmin edilebileceği gibi, bu başarılıların çaprazlanmasından elde edilen yazılıma sahip robotlar, önceki nesildeki başarısızlara göre daha başarılı; ancak halen istenene (parkuru tamamlama amacına) göre oldukça başarısız bir şekilde parkurda bir miktar ilerleyebildiler. Ancak deneme sayısı ve dolayısıyla nesil sayısı arttırıldıkça, her seferinde daha başarılı robotlara ulaşıldı. Bu da, evrimsel biyoloji ilkeleri dahilinde görmeyi beklediğimiz sonuçtur. Sonunda, yaklaşık 100 nesilden sonra elde edilen robotlar, parkuru tüm dönemeçleriyle birlikte, hiçbir yere çarpmadan, tam bir başarıyla geçmeyi başardılar. Yani parkura, dönemeçlere ve engellere dair robotlara hiçbir bilgi kodlanmamış olmasına rağmen, sadece evrimsel yasaların etkisi altında robotlar yazılım bazında ve nesiller içerisinde evrimleşmiş, çevreden gelen uyaranlara (engellerden yansıyan ışık gibi) tepki vermeye başlamış ve ortama adapte olmuşlardır.
:sharpen(0.5,0.5,true)/old%2Fcontent_media%2Fb69c4f9e953658a03aee19846cd044a8.png)
Araştırmacılar nesiller içerisinde yazılım bazında neyin değiştiğini incelediler ve iki önemli evrimsel değişim fark ettiler: ilk olarak, robotların sensörleri robot üzerine eşit olarak yerleştirilmemişti. 6 tanesi bir tarafta, 2 tanesi diğer taraftaydı. Ancak yazılıma bununla ilgili hiçbir bilgi girilmemişti (robotlar, ne tarafta daha fazla sensör olduğunu yazılımsal olarak bilmiyorlardı). Deneysel süreçte nesiller içerisinde robotlardaki yazılım, robotun 6 sensör olan tarafa doğru yönelmesini sağlayacak şekilde evrimleşmişti. Bu sayede engelle ilgili daha fazla bilgi alabilen robotlar avantajlı konuma gelmişler ve gelecek nesillere kendilerindeki bu niteliği aktarabilmişlerdi. İkinci önemli evrimsel değişimse başlangıçta rastgele olan robot hareket hızlarının, 100 nesil sonunda en yüksek hızın yaklaşık yarısı olacak şekilde sabitlendiğiydi. Öncelikle araştırmacılar bu sabitlenmenin nedenini anlayamadılar. Ancak sonradan yapılan yapay denemeler gerçeği gösterdi: robotların yazılımındaki 300 milisaniyelik yenilenme hızı nedeniyle, robotlar geçirdikleri 100 nesil içerisinde engellere tepki verebilecekleri en uygun hıza ulaşmışlardı. Yani robotlar, tam da canlılarda gördüğümüz ve beklediğimiz gibi bir adaptif evrim geçirmişlerdi.

Evrimsel robotik, başka evrimsel gerçekleri test etmek için de kullanıldı. Örneğin, av-avcı ilişkilerinin evrimini... İçerisinde av veya avcı olmaya yönelik hiçbir yazılımsal bilgi bulunmamasına rağmen, evrimsel süreçler uygulandığında, hayatta kalmak amacı dahilinde avını kovalayan avcı robot ve avcıdan kaçan av robot evrimleşti.
Burada gördüğümüz, tıpkı canlıların değişen ortam koşullarında, her yeni nesilde daha başarılı genetik kombinasyonlara sahip olanların hayatta kalabilmesi ve üreyebilmesi sonucu oluşan yeni nesillerin atalarından daha başarılı olabilmesine benzer. Her nesilde oluşan genetik (“kod temelli”) farklılıklar atalarından oldukça azdır; ancak çevresel baskıların etkisi altında bu ufak farklılıklar, uzun vadede ve çok sayıda nesilde ciddi değişimlere neden olabilecektir. Robotlarda modellenen de tam olarak budur.
Araştırmacılar aynı deneyi farklı açılardan sürdürerek birçok önemli evrimsel değişimi robotlarda gözlemeyi başardılar; yuvayı bulma, besin toplama, av-avcı ilişkisi bunlardan sadece bazıları… Dolayısıyla bu deneylerle, evrimsel değişimi mekanik unsurlarda da görmeyi başardık.
Uykunun evrimi de evrimsel robotik sayesinde incelenebildi. Tıpkı enerji düzeyimiz azaldığında ve yorgun olduğumuzda uyuduğumuz, ancak durup dururken, enerjimiz en üst noktadayken uyumadığımız gibi, bataryası en uygun düzeyin altına düştüğü zaman, geriye kalan vaktini uykuyla harcamayacak şekilde robotların evrimleşebildiği görüldü. Robotikte "uyku"dan kasıt ise, bataryasının şarj edildiği alana gidip, şarj olmaktır.
Burada aklınıza bir soru takılabilir: bu robotların fiziksel özellikleri değişmemektedir. Buna takılmakta haklısınız; ancak bu sorunun cevabı da oldukça açıktır: mühendislik malzemeleri, biyolojik hücreler gibi “esnek” yapıda değildirler. Esnekten kasıt, değişime açık, niteliklerini gelecek nesillere aktarabilen ve yukarıda gördüğümüz biçimde evrimleşebilen yapılardır. Bu konu, apayrı bir yazının konusu olabilecek olmakla birlikte, kısaca söylenmesi gereken şudur: canlılık ile cansızlık, birbirinden 3.8 milyar yıl kadar önce, kimyasal evrimin bir ürünü olarak ayrılmışlardır. Eskiden cansız olan yapılar, kimyasal evrim sayesinde biyolojik özellikler kazanmaya başlamışlardır ve bugün tarafımızdan “canlı” olarak nitelendirilir hale gelmişlerdir. Bu yapıların kazandığı özellikler, “cansız” olan mühendislik malzemelerinde bulunmaz. Bu sebeple biyolojik bir evrimi, bilgisayar yazılımı gibi esnek unsurlarda modelleyebiliriz; ancak metalden yapılmış bir makinenin, hücrelerden yapılmış bir canlı gibi evrimleşmesini bekleyemez ve bu şekilde bir modelleme yapamayız. Belki gelecekte üretilecek malzemelerle bunu da yapabilmek mümkün olacaktır, bekleyip göreceğiz. Eğer ki böyle malzemeler üretilebilecek olursa, o zaman robotlarımızın fiziksel olarak evrimleşmemesi için hiçbir engel kalmayacaktır.
---
Fark edilebileceği gibi bu bilim dalının ucu son derece açıktır. Çünkü yazılımları evrimleşebilen robotlar demek, daha karmaşık kod dizilimleri sayesinde çok daha kapsamlı işler başarabilen robotlar demektir. Robotik bilimlerinde günümüzde öğrenen, düşünen, kendini fark edebilen robotlar üretilebildiğini başlangıçta söylemiştik. İşte tüm bu robotlar, burada gördüğümüz veya buna benzeyen yaklaşımlar sayesinde üretilebilmektedir. Gelecekte, bu sayede üretebileceğimiz robotlarla, farklı gezegenlerin koşullarını insanların yaşayabileceği hale getiren, insanların fiziksel yetersizliklerinden ötürü başaramayacakları işleri kısa sürede başaran ve hayal gücümüzün gittiği her konuyu mümkün kılan robotlar üretmek mümkün olabilecektir. Yani evrimsel biyoloji ile mühendislik bilimlerinin bir araya gelmesinden doğan bu bilimin bize kazandıracakları sınırsız gibi gözükmektedir. Neler olacağını ilerleyen yıllar gösterecek.
Evrim Ağacı'nda tek bir hedefimiz var: Bilimsel gerçekleri en doğru, tarafsız ve kolay anlaşılır şekilde Türkiye'ye ulaştırmak. Ancak tahmin edebileceğiniz gibi Türkiye'de bilim anlatmak hiç kolay bir iş değil; hele ki bir yandan ekonomik bir hayatta kalma mücadelesi verirken...
O nedenle sizin desteklerinize ihtiyacımız var. Eğer yazılarımızı okuyanların %1'i bize bütçesinin elverdiği kadar destek olmayı seçseydi, bir daha tek bir reklam göstermeden Evrim Ağacı'nın bütün bilim iletişimi faaliyetlerini sürdürebilirdik. Bir düşünün: sadece %1'i...
O %1'i inşa etmemize yardım eder misiniz? Evrim Ağacı Premium üyesi olarak, ekibimizin size ve Türkiye'ye bilimi daha etkili ve profesyonel bir şekilde ulaştırmamızı mümkün kılmış olacaksınız. Ayrıca size olan minnetimizin bir ifadesi olarak, çok sayıda ayrıcalığa erişim sağlayacaksınız.
Makalelerimizin bilimsel gerçekleri doğru bir şekilde yansıtması için en üst düzey çabayı gösteriyoruz. Gözünüze doğru gelmeyen bir şey varsa, mümkünse güvenilir kaynaklarınızla birlikte bize ulaşın!
Bu makalemizle ilgili merak ettiğin bir şey mi var? Buraya tıklayarak sorabilirsin.
Soru & Cevap Platformuna Git-
 5
5
-
 4
4
-
 3
3
-
 2
2
-
 2
2
-
 2
2
-
 1
1
-
 0
0
-
 0
0
-
 0
0
-
 0
0
-
 0
0
- D. Floreano, et al. Evolution Of Adaptive Behaviour In Robots By Means Of Darwinian Selection. (1 Ocak 2010). Alındığı Tarih: 17 Haziran 2019. Alındığı Yer: NCBI | Arşiv Bağlantısı
- S. Nolfi, et al. (2004). Evolutionary Robotics. ISBN: 0-262-14070-5. Yayınevi: A Bradford Book.
- M. Patel. (2001). Advances In The Evolutionary Synthesis Of Intelligent Agents. ISBN: 0262162016. Yayınevi: A Bradford Book.
- L.N. Andrew, et al. (2019). Fitness Functions In Evolutionary Robotics: A Survey And Analysis. Robotics and Autonomous Systems, sf: 345-370. | Arşiv Bağlantısı
- S. K. Boddhu. (2019). Evolving Neuromorphic Flight Control For A Flapping-Wing Mechanical Insect. International Journal of Intelligent Computing and Cybernetics, sf: 94-116. | Arşiv Bağlantısı
- Evolutionary Robotics. Evolutionary Robotics. (17 Haziran 2019). Alındığı Tarih: 17 Haziran 2019. Alındığı Yer: Evolutionary Robotics | Arşiv Bağlantısı
- LARAL. The Evolutionary Robotics Homepage. (17 Haziran 2019). Alındığı Tarih: 17 Haziran 2019. Alındığı Yer: LARAL | Arşiv Bağlantısı
Evrim Ağacı'na her ay sadece 1 kahve ısmarlayarak destek olmak ister misiniz?
Şu iki siteden birini kullanarak şimdi destek olabilirsiniz:
kreosus.com/evrimagaci | patreon.com/evrimagaci
Çıktı Bilgisi: Bu sayfa, Evrim Ağacı yazdırma aracı kullanılarak 08/02/2026 21:54:06 tarihinde oluşturulmuştur. Evrim Ağacı'ndaki içeriklerin tamamı, birden fazla editör tarafından, durmaksızın elden geçirilmekte, güncellenmekte ve geliştirilmektedir. Dolayısıyla bu çıktının alındığı tarihten sonra yapılan güncellemeleri görmek ve bu içeriğin en güncel halini okumak için lütfen şu adrese gidiniz: https://evrimagaci.org/s/373
İçerik Kullanım İzinleri: Evrim Ağacı'ndaki yazılı içerikler orijinallerine hiçbir şekilde dokunulmadığı müddetçe izin alınmaksızın paylaşılabilir, kopyalanabilir, yapıştırılabilir, çoğaltılabilir, basılabilir, dağıtılabilir, yayılabilir, alıntılanabilir. Ancak bu içeriklerin hiçbiri izin alınmaksızın değiştirilemez ve değiştirilmiş halleri Evrim Ağacı'na aitmiş gibi sunulamaz. Benzer şekilde, içeriklerin hiçbiri, söz konusu içeriğin açıkça belirtilmiş yazarlarından ve Evrim Ağacı'ndan başkasına aitmiş gibi sunulamaz. Bu sayfa izin alınmaksızın düzenlenemez, Evrim Ağacı logosu, yazar/editör bilgileri ve içeriğin diğer kısımları izin alınmaksızın değiştirilemez veya kaldırılamaz.
:sharpen(0.5,0.5,true)/evrimagaci.org%2Fpublic%2Fimages%2Flogo-50.png)