In a significant breakthrough for the field of microrobotics, researchers at Southern University of Science and Technology have demonstrated the effective control of planar magnetic microswimmers using an open-loop approach. This innovative study sheds light on the dynamics of these tiny robots, which hold immense potential for biomedical applications such as targeted drug delivery, precision surgery, and vascular navigation.
Published on March 20, 2025, the study delves into the surface motion characteristics of V-shaped microswimmers in fluid environments, examining how variations in magnetic field strengths and rotation frequencies impact their motion. "Our findings emphasize their potential for future applications in biomedical engineering and microrobotics," wrote the authors of the article, highlighting the broader implications of this research.
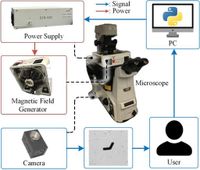
These planar microswimmers are fabricated using photolithography, with each measuring 40 μm in length, 20 μm in width, and having a central angle of 120 degrees. Such dimensions allow for maneuverability in complex biological environments, where traditional propulsion methods may falter. Utilizing a MagnetobiX AG magnetic field generator, the researchers meticulously controlled these microswimmers, adjusting their movement under varying magnetic parameters.
The results uncovered delineation between stable and unstable regions of movement based on adjustments in the magnetic field, a critical aspect for maintaining precise control. Previous studies had largely focused on fluidic propulsion; however, this investigation broadens the understanding of how these microswimmers can alternate between swimming and surface motion, which is particularly beneficial for navigating areas where fluidic propulsion is less effective.
The research team conducted experiments that tested magnetic field values ranging from 3 to 10 Hz and 1 to 24 mT. Observations revealed that at certain frequency and strength combinations, the microswimmers attained smoother and faster movement along defined paths. "The microrobots can follow predefined paths such as the letters 'S', 'M', and 'U', showcasing their navigational capabilities," wrote the authors of the article, further emphasizing the practical aspects of the research.
In addition to demonstrating individual control, the study explored swarm motion, where multiple microswimmers operate collectively under a global magnetic field. This aspect highlights the potential for complex tasks like drug delivery, where swarms can efficiently distribute medication across various locations within the body. Such capabilities not only enhance the efficacy of treatment but also ensure redundancy in case individual microswimmers fail to perform.
The experimental setup involved manipulating the microswimmers within microchannels, designed specifically with widths of 1000 μm and heights of 3000 μm to facilitate their movement. Stability in surface motion was critical, especially in narrow capillaries, as the ability to roll rather than swim allows for better navigational stability. Furthermore, by utilizing open-loop control, the researchers were able to predefine the behavior of the microswimmers without real-time feedback adjustment, although future work aims to incorporate closed-loop systems for enhanced precision.
In the experimental trajectories, each shape followed by the microswimmers— the letters 'S', 'M', and 'U'—further illustrated their ability to navigate intricate paths. The average velocity recorded ranged, reflecting varying external conditions and magnetic influences affecting their performance.
The insights gained from this research not only strengthen the foundational understanding of planar magnetic microswimmers but also lay the groundwork for future developments in controlling these devices within dynamic biological environments. The advancements in control mechanisms and the operational flexibility of these microswimmers will significantly enhance their effectiveness in medical diagnostics and therapeutics.
As researchers look to the future, the aim will be to refine these control systems further and implement three-dimensional swimming strategies to address the challenges posed by complex, flowing environments within the human body. By advancing practical applications and improving control methodologies, this study marks a pivotal step towards the successful incorporation of microscale robotics into the healthcare sector.