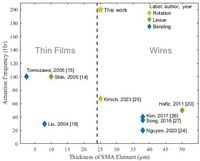
Researchers have made significant strides in the development of shape memory alloys (SME) for robotic applications, particularly through the introduction of the bidirectional rotational antagonistic (BIRAN) actuator. This novel actuator design utilizes bundles of thin SMA wires to produce rotational movements at remarkable frequencies of up to 200 Hz. This breakthrough not only sets a new frequency record for electrically activated SMA-based systems but also broadens the potential applications of SMA technology.
The actuation frequency of traditional SMA actuators typically ranges between 1 Hz and 10 Hz, which limits their use in dynamic applications. The BIRAN actuator overcomes this limitation by employing bundles of 25 μm diameter Nickel-Titanium (NiTi) wires arranged to optimize both mechanical performance and thermal management. With this configuration, the actuator can achieve significant rotation angles—a key performance indicator of actuator effectiveness.
Prior to the introduction of the BIRAN actuator, SMA systems suffered from poor dynamic behavior primarily due to thermal activation processes. When heated, the SMA materials transition between two distinct phases—martensite and austenite—drastically changing their structural properties and allowing for movement. The design of the BIRAN actuator exploits this phase transformation by effectively managing temperature through strategic current application and air cooling.
According to the authors of the article, "The BIRAN actuator reaches repeated actuation frequency of 200 Hz." This frequency presents unique opportunities for applications, especially in bio-inspired robotics, where mimicking natural movement patterns is desirable. One practical demonstration of this actuator includes its use as part of robotic wing-flapping designs, enabling more lifelike motion replication.
The experimental results showcase the actuator's performance significantly improves with increased current; for example, at 200 Hz, the actuator measures rotation angles of approximately 14°. Notably, the rotation angle exhibited notable variations with different current input levels: as the current increased from 2.5 A to 6.7 A, the performance metrics shifted accordingly, demonstrating the sensitivity of SMA actuators to their operating conditions.
This dynamic capability stems not only from the high frequencies being reached but also from the efficient cooling mechanisms implemented. The actuator’s design supports passive cooling by increasing the surface-to-volume ratio, which is effective for managing heat during operation. The authors convey, "If the applied currents are sufficiently high, almost adiabatic heating process can be reached," indicating the efficiency of both heat generation and dissipation during the actuator's operation.
The researchers strongly believe this new actuator design will significantly influence the field of robotics, providing accessible solutions for creating more responsive and adaptable robotic systems. Application areas such as flying robots stand to benefit immensely, as the increased operational capabilities of the BIRAN actuator allow for tasks requiring nuanced and rapid movements, akin to those exhibited by natural flyers such as birds and insects.
Looking forward, the team suggests exploring enhancements to the actuator's design and electronic system, as well as increasing the potential of using higher currents to maximize the achieved rotation angles at elevated frequencies. Current limitations on power supply are noted, as maximizing the angle execution at 200 Hz requires upwards of 9.8 A for optimal operation according to preliminary calculations.
Overall, the BIRAN actuator exemplifies the progressive enhancements being developed within the field of robotics. This research not only pushes the boundaries of what is achievable with SMA technology but also invites future investigation to refine its capabilities for practical applications, especially for bio-inspired robotic designs.